Motion Ride's 170mm Linkage Fork - Eurobike 2018

Let's be honest here: Linkage forks look pretty damn kooky, and I'd guess that one would need to perform considerably better than a Pike, 36 or any other top-tier telescopic fork for most riders to consider one. Matthieu Alfano, the engineer behind Motion Ride's linkage fork, swears that his design does exactly that, and all it will take is a ten-minute test ride to convince nearly anyone. Oh, and it uses a single carbon leaf spring, carbon legs, and a thru-shaft damper of his own design.
But there's been a load of stillborn linkage forks over the years, so what makes Alfano's different? Physics, he says.
The big promise with linkage forks is the anti-dive characteristics that, in brief, keep the fork from blowing through its travel due to weight transfer when you grab the front brake. Go fast in a straight line on your traditional telescopic, yank the front brake hard, and it'll gobble up a lot of its stroke just from your center of gravity getting pitched forward shortly before you get tossed out the front door. And while all that's happening, you're left with less travel to absorb bumps like, you know, it's supposed to be doing.
The big promise with linkage forks is the anti-dive characteristics that, in brief, keep the fork from blowing through its travel due to weight transfer when you grab the front brake. Go fast in a straight line on your traditional telescopic, yank the front brake hard, and it'll gobble up a lot of its stroke just from your center of gravity getting pitched forward shortly before you get tossed out the front door. And while all that's happening, you're left with less travel to absorb bumps like, you know, it's supposed to be doing.

Matthieu Alfano poses with his first proof of concept linkage fork.
But we're all just fine with the above, largely because telescopic forks have many decades of development behind them, and it's simply what we're used to. Linkage forks, however, sure as hell aren't what we're used to.

We're not in Kansas anymore, Pinkers.
Alfano says that his linkage fork is the only one out there that truly offers real anti-dive abilities because it's the only one that his its pivots in the correct places. The others have anti-dive properties, he clarified, but how effective they are depends on the rider's weight, braking force, and terrain.
The location of the pivots on his Motion Ride linkage fork work for everyone, on any terrain, and any riding style, he continued. Bold claims.

While not exactly ready for sending it, Alfano's first proto proved that he was onto something.
Alfano started his linkage fork project back in 2013 with a homemade proof of concept that, while admittedly rough looking, showed promise. It employed a RockShox damper, was designed for 26'' wheels and looks more than a little bit sketchy. But it was enough for Alfano to follow it up a year later with a prototype that put his other ideas to use: Carbon leaf springs that are pulled rather than pushed, and a damper on one side. He actually used a steering damper from a dirt bike that turned out to be a great off the shelf solution. This prototype had carbon legs, a whole load of huge steel bolts holding everything together, and a bunch of extra aluminum everywhere.
But it worked. In fact, it worked really, really well, Alfano said.


It ain't light, but the second prototype used carbon leaf springs and a steering damper from a dirt bike.
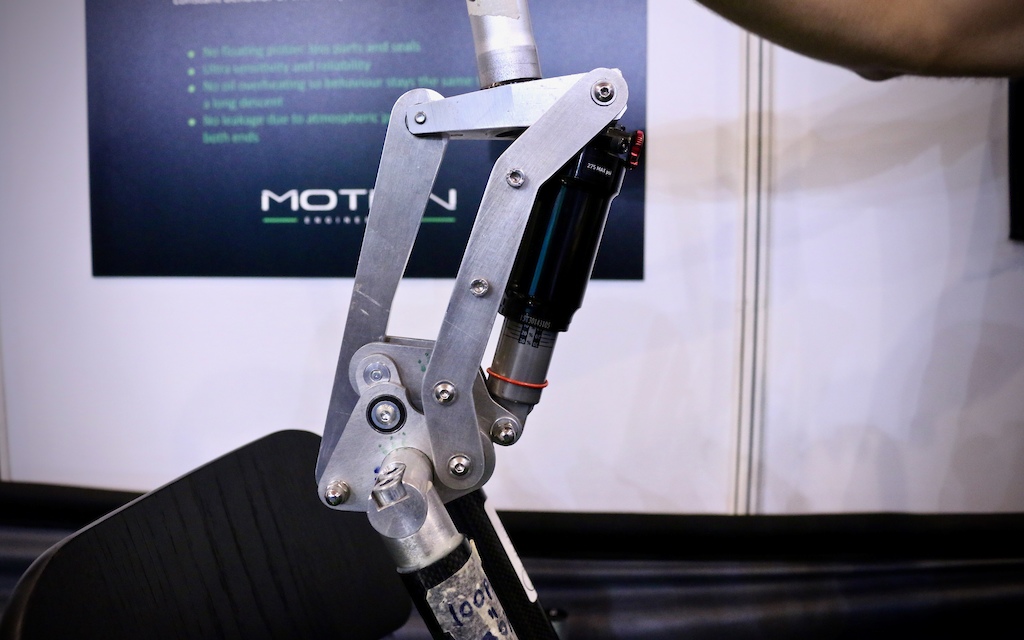
With the critical part dialed - the exact location of the pivots - and the leaf spring idea proven, the third prototype was all about Alfano designing and manufacturing his own damper. But not just any damper; this is a thru-shaft pull-damper.
Why thru-shaft? Because it doesn't require an internal floating piston that would introduce friction into the system or a bladder that adds complication. It worked, too, he said, which brings us to the pre-production fork pictured here.

The thru-shaft pull-damper is designed and built by Alfano, and you can adjust its low-speed rebound and compression simultaneously by rotating the large collar on its body.
The fork's carbon fiber leaf spring is pulled rather than pushed because, Alfano says, that motion provides a much more useful spring rate than if the leaf spring was compressed. It's said to start relatively soft off the top before ramping up much as an air spring would. Only there's obviously none of the seals or complication that comes with an air spring.
It's also remarkably adjustable, too, with the standard leaf spring using a preload screw at the lower mount that, according to Alfano, allows it to be easily tuned for rider weights between 50 and 100kg. If you're out of that weight range, Motion Ride can make you a suitable leaf spring as well.


A hex bolt at the leaf spring's lower mount lets you adjust the preload. Apparently, it can be adjusted to work for a very large weight range of riders.
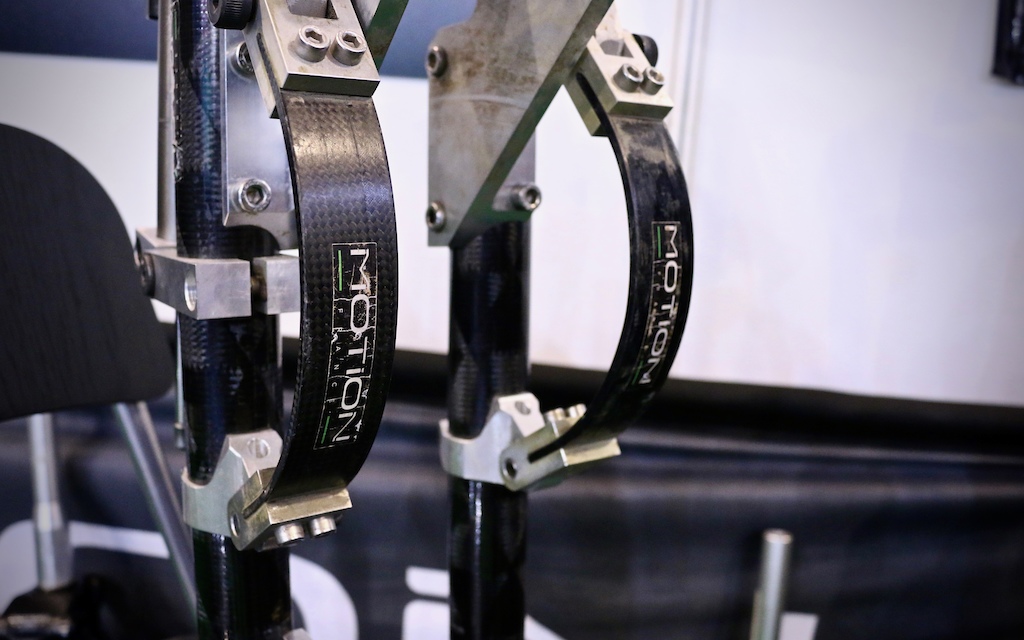
Here's a surprise: There isn't a single sealed bearing used at any of the fork's pivots. Instead, Alfano presses in high-end bushings that are precisely machined to match the aluminum axles that run through them. There are weight savings to be had from this approach - around 100-grams apparently - but Alfano explained that he went the bushing route not for gram cutting but because they last much longer than sealed bearings while also offering a bit of vibration absorption.
He also said that he has a test fork with well over 100,000 kilometers on it and the bushings are still running smoothly with zero tolerance issues.


Bushings are lighter than sealed bearings but, more importantly, they provide more support and are said to last an impressively long time.
Motion Ride has forks for both 27.5'' and 29'' (and 27.5+) wheels, with the former able to run up to 170mm of travel and the latter topping out at 160mm and at a claimed weight of 2.1kg, or 4.61lb. For reference, Fox's new 160mm-travel 36 with the Grip2 damper weighs 2.06kg or 4.54lb. You decide how much travel you want when you order the fork, so you can certainly go with less, too.
And speaking of ordering one, at €1,580, these things ain't cheap - I'll let you do the conversion to whatever your local currency is. Those who order a fork before the end of July will get a 20-percent discount if they do the whole brand ambassador thing as well, which sounds like it'd be worth a few social media posts.

The Canyon that I pedaled around had a 170mm-travel linkage fork on the front of it.
Alfano is obviously a very clever guy, and he's well aware that his biggest challenge will be getting people on his fork and convincing us that there's a different way to get the job done. I started off my conversation with him by saying that it almost doesn't matter how much better the Motion Ride fork is - if it is better at all - because we're all used to telescopic forks and how they perform. He agreed, but also said that his design is so much better than a traditional bushing-based design that having people ride the fork will be all it takes for some. I'm not so sure about that.
I absolutely had to go for an extreme, long-term, in-depth three-minute 'First Ride Review' in the parking lot of the Eurobike hall to see what would happen when I got up to speed and jammed on the front brake. But nothing happened when I did that... The fork pretty much didn't move at all, no matter how hard I braked or how forward my weight was. And then I did the same thing right into a curb, half expecting to end the first day of Eurobike with bloody knees, but the fork erased the curb while also not diving. It also squeaked like a MF'er from the pivots, something that Alfano said is due to some dust but easily fixable with a spray from the hose. Pretty neat stuff, and a review will be a must when the production version is available this September.

I've always been a fan of linkage forks - they make so much more sense mechanically than a traditional bushing system - but liking them and actually owning one are two very different things. I mean, tell me the Motion Ride fork looks good and I'll tell you that your nose is getting longer. But what if it turns out to be just as good as Alfano claims? What if it doesn't dive at all, has way less inherent friction, and is more torsionally rigid than a telescopic fork to boot?
If all of that checked out, would you consider the Motion Ride fork? Or does the fact that it looks a bit kooky immediately strike it off your list of possible fork options?
Author Info:

Must Read This Week
[UPDATED] Final Elite XC Results & Overall Standings from the Mairiporã XC World Cup 2024
41743 views
41743 views
Sign Up for the Pinkbike Newsletter - All the Biggest, Most Interesting Stories in your Inbox
PB Newsletter Signup
www.german-a.de/c/7/p/4/produkte,3/kilo-no-1
Unimogs are super cool - I happened to see one yesterday in Santa Cruz, CA.
It's a product in it's infancy, it's neither massively expensive nor overly heavy, and by all accounts seems to live up to the hype. Give it time to evolve and give him props for trying, it's more than any of you f*ckers have ever, or will ever do.
And if you go to the next article, you'll find a bunch of guys ready to sell their mom for a set of new colorfull grips..
Lol
Please PB set up a test & write up. It’s about time things were shaken up a bit.... looking at that high pivot artical the other day reminded me how much innovation there has been in our sport, long may it continue! Also nice to see positive comments on something that’s based on engineering principles not a beauty pageant! (Good engineering is of course always a beautiful thing to behold).
Would be cool to see future designs, something more universal in a way that fits the design of the rest of the bike. Then it might be more widely accepted?
.
Singletrack liking it is a good start indeed.
That’s impressive.
Also, are they the same "high end bushings" that I had to replace every three weeks on my Ariel?
Alfano, shouldn't you have done this before (or during) the show?
Just sayin...
But hey, I haven’t ridden one yet.
As for looks, I imagine they'll improve as more companies try this approach (if successful). Form should follow function (yep, I'm an engineer)! ????
So, when's the review due? Not getting one soon, but I'm curious about the performance.
So many interactions with front suspension not using telescopic suspension, that all comes down to:
what models still maintain?? BMW are very nice bla...bla...bla, but why the S1000R has telescopic suspension and when it was sold the G450X Enduro?
I love this front suspension style, understand that it's superior in many cases, but thing is....
Thing is... people buy "things" by looks...and everyone is very conservative / tradicional.
Unless this front suspension wins some EWS/DH (a 200mm version), I wish the best of all!
And three protos to determine pivot location is ideal? I hope he’s right.
That's a lot.
I mean, if I shall buy a modern bike, I would strongly consider this fork even if it's this expensive, but the God damn bushings and custom damper would repeal me, really.
Between that, the squeaking and the bushings, I do not desire this contraption.
This fork looks stupid as shit and considering the fact you have a 6:1 ratio (170mm travel, assuming 1" stroke shock) you will never get the damping capabilities you achieve with a 1:1 telescopic fork. This is why it has never been a successful idea and why the motorcycle industry has never adopted it.
high leverage ratio in the rear suspension still drive a far better damped bike. Most bikes now considerably longer stroke shocks for the same travel they featured years ago. This was one of the pushes towards the metric shock standard. Shorter eye to eye with longer stroke, for greater damping ability
Telefork weight dropped significantly only and only with air springs. There are two, or three at maximum manufacturers that produce forks for all major brands, having amazing production technology and capabilities and yet, some to-be-established few-people company was able to develope and come up with product that is actually as heavy as serial-production competitors. Can you imagine what could be done if Motion Fork had access to resources which FOX and SRAM have at SR Sountour?
Linkage fork can have much more vertical axle path, and much more even impact force required to compress it. Along other gains.
What's going to run another industry revolution hype? 28.01mm BB axle? 157.01x12.01mm hub axle? Electro shifting? 14 speed casette? Some overprized tubeless solution?
Motion Ride has designed a great product with solid kinematics, but the marketing claims are driving me crazy. Anti-dive that doesn't depend on the rider's centre of mass? That's simply not how anti-dive works. What's next, frame manufacturers claiming their bikes resist bobbing with zero pedal feedback?
singletrackworld.com/2018/07/review-motion-ride-e18-anti-dive-linkage-fork-first-ride
And while your front suspension design is neat as well, I'd like to know how much of an anti-dive behaviour does you system has? With horizontaly oriented suspension arms the anti-dive curve will quickly dive, I guess.
I've read that article, plus several non-English ones. The Motion Ride fork has an average anti-dive of roughly 100%, but the value changes considerably throughout the travel. It's essentially impossible to create a system with a constant value, so this isn't surprising and it's not inherently bad.
Attempting to replicate the Motion Ride geometry and using the centre of mass location I use for Structure calculations, I came up with a starting value over 130%, dropping to under 70%, then going back up to 120%. My pivot locations are incorrect, as I can only work from photos, but it gives the general shape of the curve. I'm not saying these values are bad, just that it's dishonest to claim the value is constant.
A telescoping fork has about -30% anti-dive (i.e. 30% pro-dive), so anything is an improvement on this! 100% anti-dive isn't necessarily the ideal value. Dive and load transfer improve traction and compliance; the preferred amount will vary for different riders and different conditions.
The SCW 1 has four settings to allow riders to tune the level of anti-dive and compliance. Longer links generally allow for more consistent values and ours are fairly consistent throughout the travel. The values go from a little less than 0% at the lowest point of the lowest setting to over 30% at the highest point of the highest setting. As stated before, the values depend on the where you assume the rider's centre of mass to be. I adjusted every pivot on the SCW 1 - even on the rear - for the centre of mass of the "average" rider for each size to ensure each chassis size has the intended ride characteristics. As far as I know, we're the only company that does that on the rear, let alone the front.
SCW1 anti-dive curve let's say for the highest setting goes from over 30% to how much? They keep around 30%?
It's not difficult to design lots of anti-dive. You want 1000% anti-dive, I'll give you 1000% anti-dive. Just as you don't want 1000% anti-squat on the rear, you don't want excessive anti-dive on the front.
The challenge is finding the right balance of chassis attitude control, traction, and compliance.
My Structure settings have average anti-dive levels of a little below 0% to quite a bit over 0%. Each setting is fairly consistent over the travel range.
Sure, it's a matter of balance.
Yes, long links are the best way to keep the curve smooth. Short links offer more control to tailor the shape of one parameter, but usually other parameters deviate in undesirable ways. And yes, long links can be a stiffness challenge. Everything is a balance of advantages and challenges. Much like Horst link vs. twin-short-link rear suspension, neither is superior in every way.
I'm excited to see more companies appreciating the front linkage design and I can't wait for Pinkbike to do a shootout test between Structure, Motion, Adroit, etc.!
Depending on the position of the instant centre, it's possible to have different axle paths with the same anti-dive. This means the balance between anti-dive and compliance isn't a constant ratio. Add to that the difference between sliding bushings, rotating bushings, and bearings; the quality of the damper; the leverage curve; etc. - it's a complicated system, and that's just the anti-dive and compliance!
Structure's WTF linkage gives us control over additional variables: as the suspension compresses, we can alter the head angle, the trail, and the bump steer. The most immediately noticeable properties of our design are the reduction in friction (typical of linkage systems) and increasing handling stability as compression increases (unique to our system). Anti-dive is great, but the magic happens when a bike can have all-mountain handling under light loads, then become more stable than a downhill bike when things get rowdy.
How much is WTF axle path vertical? Why did you not favour higher anti-dive levels, above 30%?
I am very curious how much of this technical information Structure will provide once you launch your product ;-), because even Motion does provide claims only. They have some low-resolution graphs in their video presentation. No axle-paths, leverage ratio curves, not even anti-dive curve.
I'm working on my version of Ribi style fork (I call all these versions like Motion fork a "Ribi style" since Valentino Ribi is the 1st one I know of about introducing this linkage layout), with anti-dive levels at 100%, 75% and 50%, slightly progressive leverage character and stock damper/spring. I'm about to do some radical weight saving because the 1st prototype is overbuilt way too much.
The WTF axle path is approximately half as rearward - "twice as vertical", if you like - as that of a telescoping fork. Have a look at the animation on our instagram account: www.instagram.com/structurecycleworks Note the animation is centered on the rear axle, so the front moves rearward due to both the slight shortening of the front centre and the change in rear centre (which is slightly less than average, but pretty typical).
For our wheel path, AD levels above 30% weren't as "plush" as I wanted. Still better than a telescoping fork, but riders already know how to handle dive from riding telescoping forks and I didn't want to compromise braking traction or lose the incredible comfort a linkage can provide. By allowing a little brake dive, the ride isn't as foreign and braking traction is greatly improved. Zero brake dive can cause serious problems when traction is precarious.
The Motion Ride fork has different kinematics. To their credit, they can maintain "plushness" at a higher AD (assuming their damper and bushings perform as well as a high-end shock and ball bearings). What they can't do are the stability enhancing geometry changes of our WTF: increasing trail, slackening head angle, and minimized change of front-centre length.
Is the suspension stiffening or lock-up induced by braking really so significant in higher AD levels?
Super keen to have these sort of products on the market!!
There are many ways you could help and we would appreciate any of it!
The designs are done and we're seeking investors. If you know people or groups involved with angel investing, private equity, or other small business funding, we would be happy to talk with them.
Our sales model is a hybrid of direct, dealers, and representatives. Shops, guides, and rental agencies that purchase one or more demo bikes are eligible for large commissions on any sales resulting from their demos. Please ask your favourite shops, guides, tour operators, etc. to contact us about acquiring a demo (which will give you a chance to ride one!).
Positive word of mouth is a powerful sales tool. If you know riders in the market for a high-end bike, you could mention us to them and direct them to our website. The site is currently a placeholder with a tiny bit of information and a button to sign up for our mailing list. Even joining the mailing list is valuable and we promise to not spam anyone - I've sent maybe three messages in the past six months!
We will eventually need reps in countries that generate significant sales. This is a long way down the road, but we would pay reps to host demo events and there would be commissions on sales.
Industry connections are always valuable. We're currently weak on apparel and accessory vendors.
Social media is a great way to spread the word and we encourage followers to share content from our Instagram and Facebook accounts, which you can find via www.structure.bike
Thanks again and please drop me a line whenever you like!
Naturally a stiffened suspension lacks from bump sensitivity when bump absorption is needed, but I can't guess/imagine how strong it is. Like, I've never ridden front fork without damper that's why I have no personal experience with the sole pro-dive effect of telescopic fork and hence how much the fork damper works against pro-dive.
Or, there're many bikes with fairly high and consistent anti-squat behaviour and I personally know that even 130% anti-squat allows the suspension to work, even though higher anti-squat works like a sort of dynamical threshold.
My interpretation on this is, that positive anti-dive actually pushes the front wheel against the ground, increasing the tire contact-patch and increasing the traction. If a sudden bump comes, then it's roughly about impact force (required upward movement of suspension) and suspension reluctance to compress under braking. Wheel with higher AD under hard braking will probably want to skid over small bumps.
The big difference against anti-squat is amount of acceleration. We can reach much higher accelerations under braking than under pedalling. I think this is a major reason why higher anti-dive levels like 100% may be undesirable generally (not only in user preference).
.
.
Where is Motion Ride team ?
People have proposed that high anti-squat causes the rear wheel to push down into the ground when it encounters an impact, thus increasing traction. This sounds plausible and I think it was ProFlex that called it "Dig-In Technology" (marketing terminology has become a lot slicker in the past quarter century).
The evidence is against this, though. Frames with extremely low anti-squat - Knolly being the best example - have incredible traction through rough terrain.
ProFlex of course had their Girven Vector fork that originally had what they described as a "J" shaped axle path, that was back then up, which was supposed to perform a function similar to high pivot rear suspension in terms of better handling square edge bumps, with the added benefit of being less susceptible to pedal induced bob as the up/down motion of pedaling didn't as directly activate the front/back movement of the initial portion of suspension travel (this was before sag was a thing in bike suspension). Girven changed that "J" shaped path at some point, because riders complained it felt like the front end was folding under them on steep terrain as the front center would shorten more, at least initially, than telescoping forks. Obviously the situation with your fork would be reversed as you have a more vertical axle path than a telescopic fork.
Of more interest to me though is the AMP fork. I once saw a pic of John Castellano (who designed the Sweet Spot URT suspensions), riding with a modified AMP fork that had the "crown" and linkage spun 180 degrees from the stock setup that was sold to consumers, and I always wondered what characteristics he was hoping to improve with that reversal of the link angles. Any ideas on the axle path on that fork's travel (all 1.9" of it!)?
I'm not wanting to challenge your years long real-world testing of your prototypes, just would like to sort these things with your hints :-) You already made me to seek for alternative pivot positions in my linkage to gain even 0% for the 1st half of travel :-).
I'm away from my computer, so I can only comment on what I recall from when I analyzed these forks quite some time ago.
First, the AMP is difficult to analyze with confidence because of short links - an error of a millimeter dramatically changes the outcome.
Almost every front linkage design has used the "J-hook" axle path. It sound reasonable to attempt to align the axle path with a typical impact vector for maximum compliance, but, as you noted, this results in the the wheel "tucking under" - i.e. rapid loss of front-centre length. One parameter was slightly improved at the expense of a more significant one. This wasn't a serious issue when travel was minimal, but longer travel designs, such as Whyte's PRST, became unstable in challenging terrain due to this effect.
By using bearings at our pivots, rather than linear bushings subjected to a severe bending moment, friction is nearly eliminated. There's little to gain by chasing the last few percentage points of compliance, so we focused on dynamic geometry changes to increase handling stability under load. That's the key difference between our implementation and past designs.
When using anti-squat as an analogy to anti-dive, we have to consider the behaviour under pedaling load, as this is analogous to braking load. A high AS bike pedals roughly in rough terrain and can lose traction. The effect is more severe in the braking / AD analogy because brake forces can be so powerful.
It's difficult to know the ideal shape of the AD curve. As the suspension approaches full bump, there will be more force on the contact patch, so high AD shouldn't cause problems with traction. On the other hand, spring force is so high that there's little need for additional AD to support the suspension. AD is most valuable near full droop, when spring force is minimal, yet this is also when it has the most detrimental impact on traction.
This is a complicated issue and I haven't prototyped a wide variety of curves with radically different shapes. The SCW 1 maintains a nearly flat and very predictable curve. In most cases, predictable behaviour is better than "ideal" kinematics.
You can just email me at Ryan at Structure.bike and I'll do it manually.
Thank you!
Interesting idea.
Bushings are not better than bearings.
It was used 100% correctly, was a very, very appropriate word to use, and certainly doesn't have to have anything to do with a child. Stillbirth, on the other hand, refers directly to an infant dying while still in the womb. I'd never joke about the subject, but it's also okay to use that word as well. They're just words @danlovesbikes I've written plenty of inappropriate things for you to word-police me about, but "stillborn'' ain't one of them
on solely the ugly part i would get a better fork than this monstrosity.